La capacité de votre voiture à comprendre son environnement est tributaire de nombreux systèmes et types de capteurs. L'interprétation que fait la voiture des données qu'elle collecte l'aide à prendre des décisions, en particulier en ce qui concerne les fonctions d'assistance au conducteur.
| Caméras | Les caméras fonctionnent d'une façon semblable à l'œil humain. Leurs images sont utilisées à différentes fins, selon la caméra concernée. Par exemple, la caméra supérieure orientée vers l'avant aide la voiture à détecter des éléments tels que les panneaux de signalisation et la signalisation au sol, tandis que la caméra de stationnement arrière affiche des images à l'écran central. |
| Radars | Les radars utilisent des ondes radioélectriques pour recueillir des informations concernant l'environnement de la voiture. Ils peuvent déterminer la distance par rapport aux objets et certaines caractéristiques du mouvement de ces derniers. Ces informations sont essentielles à de nombreuses fonctions de la voiture. |
| Lidar | Le lidar utilise des rayons infrarouges pour recueillir des informations concernant l'environnement de la voiture. Il dispose d'une capacité de détection à longue distance des objets situés devant la voiture, mais il peut également détecter des objets à courte distance. |
| Capteur de stationnement à ultrasons | Ces capteurs utilisent des ondes acoustiques pour détecter les objets relativement proches. Ils envoient des impulsions ultrasoniques qui leur sont renvoyées lorsqu'elles rencontrent un objet. |
Interactions des systèmes
Les différents types de détection se complètent mutuellement. Ils sont parfois utilisés isolément et parfois conjointement.
Important
Limites générales de la détection
- La voiture n'est pas toujours en mesure de faire face aux situations imprévisibles ou atypiques. Lorsque la voiture a des difficultés à percevoir son environnement ou à interpréter une situation, la pertinence de ses réactions en souffrira.
- L'endommagement de la voiture peut affecter la détection et les fonctions qui y ont recours. La voiture est capable de détecter de nombreuses pannes, mais certaines ne peuvent pas faire l'objet d'un autodiagnostic. C'est pourquoi il est important de veiller à ce que la voiture soit en bon état. Contactez un atelier Volvo agréé si vous soupçonnez une panne ou si vous remarquez un dommage à la voiture.
- Les facteurs et conditions de limitation peuvent, et c'est souvent le cas, coïncider. Ils peuvent se cumuler et interagir de telle manière à générer une réponse incorrecte de la voiture.
Limites de détection des obstacles
La détection des obstacles aide la voiture à identifier certains objets stationnaires et en mouvement. Il peut s'agir d'autres usagers de la route, tels que des piétons ou d'autres véhicules, d'animaux, de barrières ou d'autres objets. S'ils se trouvent sur ou à proximité du chemin de conduite de la voiture, ils pourraient présenter un risque de collision. En fonction des circonstances, la voiture peut être en mesure d'avertir ou d'intervenir si l'objet est précisément identifié. Pour tous les types d'objets que la voiture peut identifier, plusieurs facteurs peuvent empêcher la bonne identification. Voici des exemples de facteurs, situations et événements imposant une limite :
- Objets et usagers de la route qui présentent une grande proximité, se chevauchent ou sont partiellement bloqués.
- Objets et usagers de la route qui se confondent avec l'arrière-plan.
- Objets et usagers de la route qui se déplacent ou accélèrent de manière particulièrement rapide.
- Véhicules atypiques, par exemple une bicyclette à position allongée, une moissonneuse-batteuse ou une remorque dont le chargement présente une forme inhabituelle
- Vélos de type ou de taille qui change par rapport à un vélo adulte classique.
- Nouveaux modes de transport.
- Vêtements ou objets transportés qui modifient la silhouette d'un piéton.
- Piétons mesurant moins de 80 cm (32 pouces).
- Obstacles orientés de telle sorte à créer une silhouette inconnue.
- Taille et vitesse des animaux. les chiens et les chats sont souvent trop petits pour être détectés avec fiabilité.
Note
Exemples de détection de circulation
Les exemples de différents scénarios de circulation peuvent vous aider à comprendre certaines des limites des systèmes de détection de votre voiture. Les scénarios de la vie réelle sont souvent plus complexes que ceux fournis à titre d'exemple1 dans ce manuel.
Hors champ et détection tardive
Les différentes zones de détection autour de votre voiture sont statiques, chacune avec une portée et un champ de vision limités. Si un élément pénètre dans une zone de détection selon un angle inhabituel, à grande vitesse ou très proche de votre voiture, cela peut entraîner une réponse rapide. Les marges de sécurité se trouvent réduites par rapport à une situation permettant une détection plus précoce.
Important
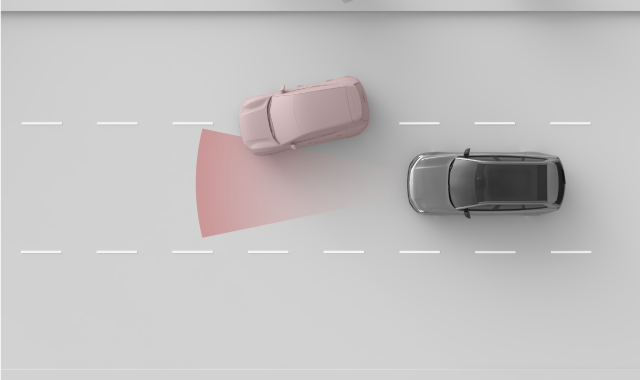
Positionnement dans la voie et petits véhicules
Pour la détection à l'avant, le milieu de la voie est plus favorable que ses parties extérieures. Les véhicules peuvent ne pas être détectés s'ils n'occupent pas le milieu de la voie. Si cela peut se produire pour n'importe quel véhicule, le risque est accru pour les plus petits, notamment les motocyclettes. Elles occupent moins de la moitié de la voie et peuvent se déplacer plus dans la voie. Soyez toujours particulièrement attentif à tous les véhicules qui ne roulent pas au milieu de la voie.
Forme, taille et nombre des objets
- Les petits objets sont plus difficiles à identifier.
- Plus il y a d'objets, plus il est difficile de les identifier de manière individuelle.
- Les objets proches les uns des autres qui se chevauchent sont plus difficiles à identifier.
- Les objets dont la forme n'est pas uniforme, par exemple avec un surplomb ou des éléments qui ressortent, sont plus difficiles à identifier.
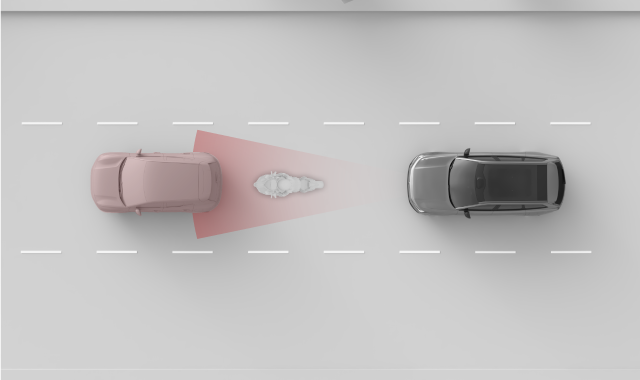
La présence d'un véhicule de grande taille devant la voiture peut gêner la détection d'un véhicule plus petit, une motocyclette par exemple.
Important
Remorque devant
Par rapport à beaucoup d'autres véhicules sur la route, la détection des remorques est souvent moins fiable en raison de leur forme et de leur hauteur. Cela concerne particulièrement les remorques fines, les remorques basses et les remorques dont les plateaux de chargement sont très élevés. Ces types de remorques ne présentent généralement pas une zone de surface suffisante à hauteur des systèmes de détection à l'avant.
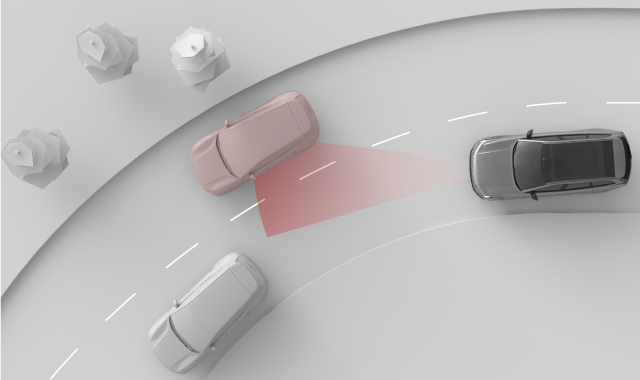
Routes et infrastructures
Les sinuosités de la route peuvent induire la voiture en erreur dans l'interprétation de la situation. Elle peut, par exemple, perdre la trace d'un véhicule ou se tromper dans la détermination de la voie sur laquelle se trouve un véhicule qui vous précède.
Important
Conditions routières et irrégularités
- Les virages serrés et les trous dans la chaussée peuvent obscurcir temporairement des parties importantes de l'environnement de la voiture, par exemple les autres véhicules ou les marquages au sol.
- Les infrastructures routières non standard ou inhabituelles ne sont pas toujours correctement identifiées par la voiture. Par exemple, les travaux routiers ou les déviations peuvent entraîner la présence d'ensembles contradictoires ou multiples de marquages au sol.
- Les marquages au sol ou les panneaux anciens ne sont pas toujours correctement identifiés.