Rilevamento dell'ambiente circostante e del traffico
La capacità della tua auto di comprendere l'ambiente circostante è frutto di molti sistemi e tipi di sensori. L'interpretazione dei dati raccolti dall'auto aiuta a comprenderne il comportamento, soprattutto per quanto riguarda le funzioni di supporto al conducente.
| Telecamere | Le telecamere funzionano in modo simile all'occhio umano. Le immagini acquisite vengono utilizzate per scopi diversi, che dipendono dalla telecamera. Ad esempio, la telecamera anteriore superiore aiuta l'auto a identificare elementi come cartelli stradali e segnaletica, mentre la telecamera posteriore di parcheggio trasmette le immagini acquisite sul display centrale. |
| Radar | I radar utilizzano le onde radio per acquisire informazioni sull'ambiente circostante l'auto. Possono identificare la distanza degli oggetti e alcuni aspetti del loro movimento. Queste informazioni sono essenziali per molte funzioni dell'auto. |
| Lidar | Il lidar utilizza onde di luce laser per acquisire informazioni sull'ambiente circostante l'auto. Possiede capacità di rilevamento a lunga distanza per gli oggetti che si trovano davanti all'auto, ma riesce anche a rilevare oggetti a distanza ravvicinata. |
| Sensori di parcheggio a ultrasuoni | Questi sensori utilizzano le onde sonore per rilevare oggetti relativamente vicini. Funzionano inviando impulsi di ultrasuoni che possono rimbalzare verso i sensori quando incontrano un oggetto. |
Come si integra il funzionamento dei vari sistemi
I diversi tipi di rilevamento si completano a vicenda. A volte vengono utilizzati da soli e in alcuni casi assieme.
Importante
Limiti generali di rilevamento e identificazione
- Non sempre, l'auto è in grado di gestire situazioni imprevedibili o insolite. Quando l'auto ha difficoltà a identificare correttamente l'ambiente o la situazione del traffico, la sua risposta è meno accurata.
- I danni all'auto possono compromettere il rilevamento e le funzioni. Molti guasti sono identificabili dall'auto, ma alcuni potrebbero non esserlo senza ulteriori interventi. Per questo motivo, è importante assicurarsi che l'auto sia in buone condizioni e funzioni senza problemi. Se sospetti la presenza di un guasto o se noti un danno all'auto, rivolgiti a un'officina autorizzata Volvo.
- I fattori e le condizioni limitanti possono coincidere, e spesso coincidono. Possono combinarsi e interagire in modo tale da provocare una risposta sbagliata da parte dell'auto.
Limitazioni nel rilevamento degli ostacoli
Il rilevamento degli ostacoli aiuta l'auto a identificare alcuni oggetti fermi e in movimento. Può trattarsi di altri utenti della strada, come pedoni o altri veicoli, animali, barriere o altri oggetti. Se si trovano nella traiettoria di guida dell'auto o nelle sue vicinanze, potrebbero comportare un rischio di collisione. Se l'oggetto viene identificato con precisione, a seconda delle circostanze, l'auto potrebbe essere in grado di avvisare o intervenire. Ci sono molti fattori relativi a tutti i tipi di oggetti che l'auto può identificare, che possono impedire un'identificazione accurata. Esempi di fattori, situazioni ed eventi limitanti sono:
- Oggetti e utenti della strada molto distanti, sovrapposti o parzialmente bloccati.
- Oggetti e utenti della strada che si confondono con lo sfondo.
- Oggetti e utenti della strada che si muovono o accelerano particolarmente velocemente.
- Veicoli non comuni, come biciclette reclinate, mietitrebbie o rimorchi con carichi di forme insolite.
- Biciclette di tipo o dimensioni diverse rispetto alle normali biciclette per adulti.
- Nuove modalità di trasporto.
- Abbigliamento o oggetti trasportati che alterano la sagoma di un pedone.
- Pedoni più bassi di 80 cm (32 pollici).
- Ostacoli inclinati in modo da creare una sagoma non riconoscibile.
- Dimensioni e velocità degli animali. Gatti e cani sono spesso troppo piccoli per essere identificati in modo affidabile.
Nota
Esempi di rilevamento nel traffico
Esempi di diversi scenari di traffico possono aiutarti a capire alcuni limiti dei sistemi di rilevamento della tua auto. Spesso, gli scenari reali sono più complessi degli esempi illustrati in questo manuale1.
Rilevamento in ritardo e fuori dalla portata visiva
Le varie zone di rilevamento intorno alla tua auto sono statiche, ognuna con un raggio e un campo visivo limitati. Se qualcosa entra in un'area di rilevamento con un'angolazione insolita, ad alta velocità o molto vicino alla tua auto, può provocare una risposta rapida. Questo riduce i margini di sicurezza rispetto a una situazione in cui era possibile un rilevamento anticipato.
Importante
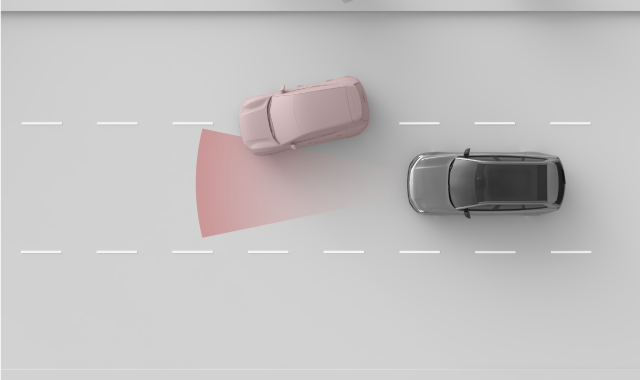
Posizionamento della corsia e veicoli di piccole dimensioni
Nel rilevamento anteriore, il centro della corsia è più agevolato rispetto alle parti esterne. I veicoli possono passare inosservati se non si trovano al centro della corsia. Anche se questo può accadere per qualsiasi veicolo, il rischio è maggiore per quelli piccoli, come le moto. Occupano una parte minore della corsia e possono muoversi di più al suo interno. Presta sempre molta attenzione ai veicoli che non viaggiano al centro della corsia.
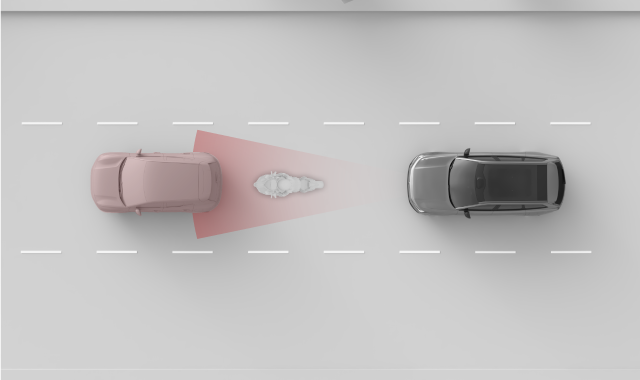
Forma, dimensioni e numero di oggetti
- Gli oggetti piccoli sono più difficili da identificare.
- Più è alto il numero di oggetti, più è difficile identificarli singolarmente.
- Gli oggetti vicini che si sovrappongono sono più difficili da identificare.
- Gli oggetti con forme non uniformi, con sporgenze o parti che sporgono, sono più difficili da identificare.
La presenza di un veicolo anteriore di grandi dimensioni può rendere difficile l'identificazione di un veicolo più piccolo, come una moto.
Importante
Rimorchio davanti
Rispetto a molti altri veicoli presenti sulla strada, il rilevamento dei rimorchi è spesso meno affidabile a causa della loro forma e altezza. Questo vale, in particolare, per i rimorchi stretti, bassi e con pianali di carico molto alti. Questi tipi di rimorchi spesso non hanno una superficie sufficiente all'altezza in cui sono puntati i sistemi di rilevamento anteriori.
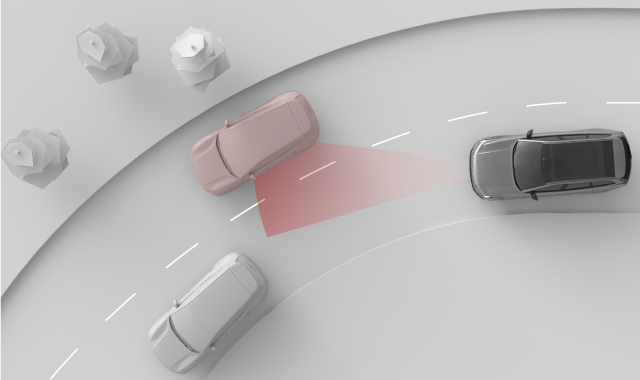
Strade e infrastrutture
Una strada con curve può indurre l'auto a interpretare male la situazione del traffico. Ad esempio, può perdere di vista un veicolo o sbagliare l'identificazione della corsia in cui si trova il veicolo che precede.
Importante
Condizioni della strada e irregolarità
- Le curve strette e le irregolarità della strada possono oscurare temporaneamente parti importanti dell'ambiente circostante l'auto, come altri veicoli o la segnaletica stradale.
- Le infrastrutture stradali non standard o insolite potrebbero non essere identificate correttamente dall'auto. Ad esempio, i lavori stradali o le deviazioni del traffico possono provocare conflitti così come più serie di segnaletica stradale.
- La segnaletica stradale o i segnali stradali usurati potrebbero non essere identificati correttamente.