A capacidade do seu automóvel para compreender a sua envolvência é obtida através de muitos sistemas e tipos de sensores. A interpretação do automóvel dos dados recolhidos ajuda a informar o seu comportamento, especialmente para funcionalidades de apoio ao condutor.
| Câmaras | As câmaras funcionam de modo semelhante ao olho humano. O que capturam é utilizado para diferentes finalidades, que dependem da câmara. Por exemplo: a câmara virada para a frente superior ajuda o automóvel a identificar coisas como sinais de trânsito e marcações de estrada, enquanto que a vista da câmara de estacionamento traseira é apresentada no mostrador. |
| Radares | Os radares utilizam ondas de rádio para recolher informações sobre a envolvência do automóvel. Estes podem identificar a distância aos objetos e determinados aspetos dos seus movimentos. Estas informações são essenciais para muitas funcionalidades do automóvel. |
| Lidar | O lidar utiliza ondas de luz para recolher informações sobre a vizinhança do automóvel. Tem capacidades para a deteção a longa distância de objetos na frente do automóvel, mas também pode detetar objetos a curta distância. |
| Sensores de estacionamento ultrassónicos | Estes sensores utilizam ondas de som para detetar objetos relativamente próximos. Estes funcionam enviando impulso de ultrassons que podem refletir de voltar para os sensores quando encontram um objeto. |
Como os sistemas funcionam em conjunto
Os diferentes tipos de deteção complementam-se. Por vezes são utilizados isoladamente e outras vezes em conjunto.
Importante
Limitações de identificação e deteção gerais
- O automóvel nem sempre consegue gerir situações imprevisíveis ou anormais. Quando o automóvel encontra dificuldades em identificar com clareza o ambiente ou a situação de trânsito, a precisão da sua resposta é afetada.
- Danos no automóvel podem afetar a deteção e as funcionalidades que dela dependem. Muitas falhas podem ser identificadas pelo automóvel, mas algumas podem não ser possíveis de autodiagnosticar. É por isso importante assegurar que o automóvel está em bom estado e a funcionar devidamente. Contacte uma oficina autorizada Volvo caso suspeite que existe alguma avaria ou repare em algum danos no automóvel.
- Fatores e condições limitadores costumam coincidir. Estes podem agravar e interagir de modos que resultem numa resposta incorreta do automóvel.
Limitações da deteção de obstáculos
A deteção de obstáculos ajuda o automóvel a identificar determinados objetos parados e em movimento. Estes podem ser outros utilizadores da estrada, como peões ou outros veículos, animais, barreiras ou outros objetos. Caso estes se encontrem perto do trajeto de condução, podem representar um risco de colisão. Dependendo das circunstâncias, o automóvel pode conseguir avisar e intervir caso o objeto seja corretamente identificado. Para todos os tipos de objetos que o automóvel consegue identificar, existem muitos fatores que podem impedir uma identificação correta. Exemplos de fatores, situações e eventos limitadores incluem:
- Objetos e utilizadores da estrada com espaço curto entre si, sobrepostos ou parcialmente ocultos.
- Objetos e utilizadores da estrada que se misturem com o fundo.
- Objetos e utilizadores da estrada que se deslocam ou aceleram de modo muito rápido.
- Veículos invulgares, como bicicletas reclinadas, ceifeiras-debulhadoras ou atrelados com cargas de forma invulgar.
- Bicicletas de um tipo ou dimensão diferente das bicicletas normais para adultos.
- Novos modos de transporte.
- Vestuário ou objetos transportados que podem alterar a silhueta de um peão.
- Peões de altura inferior a 80 cm (32 polegadas).
- Obstáculos em ângulos que resultem numa silhueta desconhecida.
- Tamanho e velocidade de animais. Gatos e cães são frequentemente demasiado pequenos para serem identificados com segurança.
Nota
Exemplos de deteção de trânsito
Exemplos de diferentes cenários de trânsito podem ajudá-lo a compreender algumas das limitações dos sistemas de deteção do seu automóvel. Na realidade, os cenários são frequentemente mais complexos do que os exemplos ilustrativos1 deste manual.
Fora do campo de visão e deteção tardia
As várias zonas de deteção à volta do seu automóvel são estáticas, cada uma com um campo de visão limitado. Se algo entrar numa zona de deteção por um ângulo invulgar, a velocidade elevada ou demasiado próximo do seu automóvel, pode provocar uma resposta rápida. Isto reduz as margens de segurança em comparação com uma situação em que a deteção precoce é possível.
Importante
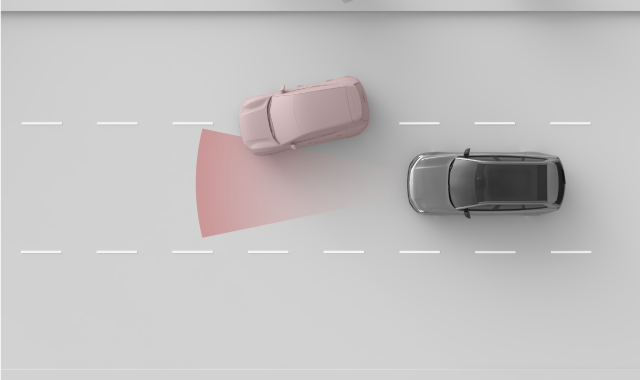
Localização na via e pequenos veículos
Na deteção dianteira, a posição no meio da via é mais favorável do que as zonas exteriores. Os veículos podem permanecer indetetados quando não ocupam o meio da via. Embora isto possa acontecer para qualquer veículo, o risco é superior com veículos menores, como motociclos. Estes ocupem menor largura da via e podem deslocar-se com maior amplitude no seu interior. Tenha sempre cuidado adicional aos veículos que não se deslocam no meio da via.
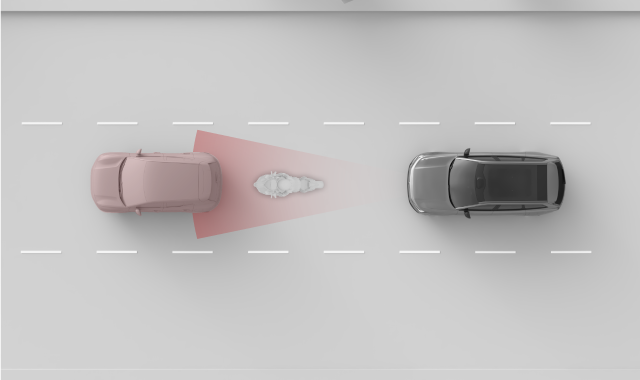
Forma, tamanho e número de objetos
- Objetos pequenos são mais difíceis de identificar.
- Quanto maior o número de objetos, mais difícil é a identificação de cada um.
- Objetos muito próximos que se sobreponham são mais difíceis de identificar.
- Objetos com forma irregular, como com saliências ou elementos projetados, são mais difíceis de identificar.
A presença de um veículo grande na frente pode tornar difícil identificar outro menor, como um motociclo.
Importante
Atrelado na dianteira
Quando comparado com muitos outros veículos na estrada, a deteção de atrelados é frequentemente menos fiável devido às suas formas e alturas. Isto aplica-se especialmente a atrelados estreitos, atrelados baixos e atrelados com plataformas de carregamento muito altas. Estes tipos de atrelados não têm área de superfície suficiente à altura onde operam os sistemas de deteção dianteiros.
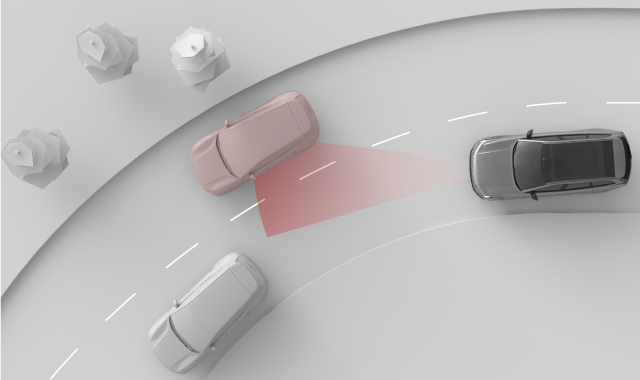
Estrada e infraestrutura
Curvas na estrada podem resultar em que o automóvel interprete incorretamente a situação de trânsito. Por exemplo, pode perder contacto com um veículo ou identificar incorretamente a via em que o veículo na frente se encontra.
Importante
Estado da estrada e irregularidades
- Curvas apertadas e lombas na estrada podem ocultar temporariamente partes importantes da envolvência do automóvel, como outros veículos e marcações da estrada.
- Infraestruturas de estrada irregulares ou invulgares podem não ser identificadas corretamente pelo automóvel. Por exemplo, trabalhos na estrada ou desvios de trânsito podem resultar em vários conjuntos de marcações de estrada ou em conflito entre si.
- Marcações de estrada ou sinais gastos podem não ser corretamente identificados.